【黑科技】拖车型双重发电型消防灭火机器人HFH-TC-YD80

【黑科技】拖车型双重发电型消防灭火机器人HFH-TC-YD80
优点:
一、部署速度快,比普通消防机器人快5分钟。
二、无需专用运输车辆,节省20万经费和专职驾驶员。节省运输车占地面积。(北上广深大城市无比重要,车位金贵)
三、符合应急机器人实际需求,如果机器人亏电,该款双重自发电消防机器人可以在运输中自动补充电能,在灭火时自动补充电能。
【黑科技来袭】不用充电的消防机器人

模块化拖车型双重发电型消防灭火机器人
(自动发电的拖车型大流量消防炮机器人)
主要性能指标
1)平台
外形尺寸 长3.1米、宽1.65米、高1.1米
战斗全重 350千克
平台自重 230千克
承载能力 1500千克


限制机器人的,永远是电池,电池,电池!
【黑科技来袭】不用充电的消防机器人
无需消防机器人运输车辆,综合使用成本低!
无需从运输车上下,部署速度超快!
模块化设计,多样功能随意发挥!
(灭火、排烟、排爆。。。天马行空的发挥)
一种轮毂电机型自发电消防灭火拖车机器人,属于机器人和拖车双重技术领域,可应用于消防、排爆、起重和军事等领域,利用拖车被拖拽时电磁发电功能,,实现了行车充电。同时解决移动机器人户外连续转场时的充电电源难题和充电时间难题;利用拖拽发电功能,在刹车和下坡时起到辅助刹车作用;再利用左右车轮动力电机独立工作的设计,辅以带轮拖车千斤顶的支撑作用,把拖车变成了一台移动的机器人底盘,实现遥控行走;利用拖车上的多孔型通用甲板平台设计,辅以甲板平台上的信号插座,轻松安装各种机器人任务模块,满足不同环境对机器人的不同功能需求。
模块化自发电消防灭火机器人,采用全球独一无二的水压差自发电消防水炮技术,破解传统消防机器人拖水管,电力实际只能工作20分钟左右的真实工作时间瓶颈,以水压转机械运动和发电转换的方法,给予消防机器人左右摇摆运动所需要的机械力,和行走所需要的电能,满足各种环境的消防灭火需求,实现真正的机器人换人的目标。
(采用与卡车电压一致的低压供电设计。)
常探机器人——模块化拖车型双重发电型消防灭火机器人
拖拽发电+水力发电+水力运动=即取即用型自发电机器人
会发电的变形金刚——中国原创专利 世界领先科技
www.ctrobot.com www.ctjqr.com
13775232000 13218666656
模块化设计 维护方便 升级方便
装备设计决定战斗力
【机器人、无人机、直升飞机行业未来展望】
一体化的设计会将【机器人、无人机、直升飞机 】性能牢牢套死在当前的廉价附件性能水平之下。
相反,只要能得到高性能附件的支持,即使老旧【机器人、无人机、直升飞机】平台也能换发新春。
模块化机器人、无人机、直升机——未来的机器人、无人机、直升飞机将不再根据特定任务来设计和构建,新机器人系统最终有望推动生产可以适应不同任务要求的机器人、无人机、直升飞机。
模块化是复杂产品系统发展的"必由之路"!
说明书摘要
本发明公布一种轮毂电机型自发电消防灭火拖车机器人,属于机器人和拖车双重技术领域,可应用于消防、排爆、起重和军事等领域,利用拖车被拖拽时电磁发电功能,同时解决移动机器人户外连续转场时的充电电源难题和充电时间难题;利用拖拽发电功能,在刹车和下坡时起到辅助刹车作用;再利用左右车轮动力电机独立工作的设计,辅以带轮拖车千斤顶的支撑作用,把拖车变成了一台移动的机器人底盘,实现遥控行走;利用拖车上的多孔型通用甲板平台设计,辅以甲板平台上的信号插座,轻松安装各种机器人任务模块,满足不同环境对机器人的不同功能需求。
超级消防部队用超级自发电消防水炮-演示视频:
正常供水压力1.0——1.2mpa,实验中供水压力0.75mpa,属于欠压工作,照样发电!

摘要附图

权利要求书
1,一种轮毂电机型自发电消防灭火拖车机器人,包括拖车支架(1);所述拖车支架(1)前端设有拖车连接器(2)和带轮拖车千斤顶(3);在拖车支架(1)的两侧分别设有左车轮(4)、右车轮(5);所述左车轮(4)、右车轮(5)分别通过悬挂(6)与拖车支架(1)连接;
其特征在于:
所述左车轮(4)、右车轮(5)分别连接有轮毂型电机(7);所述轮毂型电机(7)通过切换继电器连接有一个电机驱动器和一个发电控制器,电机驱动器连接有机器人控制器;
所述拖车支架(1)下固定有控制箱(8),所述电机驱动器、机器人控制器、发电控制器安装在控制箱(8)内;
在所述拖车支架(1)下还固定有用于向控制箱(8)内电机驱动器供电的电池箱(9);发电控制器连接电池箱(9);
所述拖车支架(1)的甲板平台(15)开设有多个均匀分布的固定孔(10);固定孔(10)是对称式或矩阵式排列;甲板平台(15)上通过固定孔(10)安装有消防水炮(16)。
2,根据权利要求1所述的轮毂电机型自发电消防灭火拖车机器人,其特征在于:从所述轮毂型电机(7)到发电控制器到电池箱(9)的回路中,设置有发电开关;所述电机驱动器和机器人控制器连接电池箱(9);所述电池箱(9)连接有充电口;所述发电控制器为MTTP发电控制器。
3,根据权利要求1所述的轮毂电机型自发电消防灭火拖车机器人,其特征在于:所述机器人控制器连接有固定在拖车支架(1)上的天线(11);所述天线(11)通过无线连接有机器人遥控器;所述天线(11)包括一个负责与机器人遥控器收发信号的无线通讯天线,和一个负责传输图像到机器人遥控器的影音传输天线。
4,根据权利要求1所述的轮毂电机型自发电消防灭火拖车机器人,其特征在于:所述拖车支架(1)的前后侧分别安装有摄像头。
5,根据权利要求1所述的轮毂电机型自发电消防灭火拖车机器人,其特征在于:所述拖车支架(1)的甲板平台(15)上设有凹型信号坑(12)或凸型信号塔;所述凹型信号坑(12)或凸型信号塔中安装有航空插座;所述航空插座连接到机器人控制器,航空插座还连接有一个对外电机驱动器,对外电机驱动器与机器人控制器相连。
6,根据权利要求1所述的轮毂电机型自发电消防灭火拖车机器人,其特征在于:所述左车轮(4)、右车轮(5)共设有一对、两对、或者两对以上。
7,根据权利要求1所述的轮毂电机型自发电消防灭火拖车机器人,其特征在于:所述悬挂(6)为独立悬挂或非独立悬挂。
8,根据权利要求1所述的轮毂电机型自发电消防灭火拖车机器人,其特征在于:所述悬挂(6)为弹簧钢板或者扭力轴。
9、根据权利要求1所述的轮毂电机型自发电拖车,其特征在于:所述轮毂电机为永磁无刷轮毂电机。
10、根据权利要求1所述的分体电机型自发电消防灭火拖车机器人,其特征在于:所述消防水炮(16)为水力自摆炮或者自摆自发电消防水炮。



说明书
轮毂电机型自发电消防灭火拖车机器人
技术领域
本发明涉及车辆技术领域,具体是一种轮毂电机型自发电消防灭火拖车机器人,可应用于消防、排爆、起重、和军事等领域。
背景技术
随着我国经济建设的快速发展,城市化和工业化进程不断加快,机器人和拖车作为一种新型工具将被普遍使用。拖车具有携带和部署方便,装备重量大的优点。
但在拖车和机器人领域面临五个显著弊端:
1、拖车容易导致前车刹车失灵:经常开拖车的司机都非常害怕下坡路和急刹车,因为极其容易出现刹车失灵等事故,除了刹车系统疏于保养外,非常重要的一个因素就是满载的拖车会推着前面的车辆往前走,从而产生折叠效应,导致车辆失控;
2、拖车不能自主行走:传统的拖车本身不能被自主行走,必须依赖其他车辆的牵引才能停车,自主停车入库困难;
3、户外状态移动机器人充电困难:传统的电力式移动机器人必须通过固定充电装置来实现充电,一般很难利用运输过程中的宝贵时间边走边充电,在紧急情况下,如果没有充满电能,那么投入使用的将是能量不足的机器人。这些无法在户外无法充电的机器人,严重影响装备的使用效果;
4、机器人运输和装卸不便:由于传统的移动机器人,底盘行走速度较慢,长距离运输时,必须借助其他车辆托运。但是都存在装卸麻烦、耽误宝贵时间、贻误救灾的的显著缺点;
5、拖车功能单一,运输时重心偏高,导致安全系数低:经常只能作为运输工具用途,未发挥拖车底盘的机械性能。假如运输中大型机器人时,整机装备就是拖车底盘+机器人底盘的双重重量,不仅占用空间大,而且载重大,重心过高,所载机器人还容易倾覆。
发明内容
本发明的目的是提供一种具有遥控自行走功能的轮毂电机型自发电消防灭火拖车机器人,在户外被牵引状态下能够自动充电的功能。并且通过多孔的模块化甲板平台,和各个拓展用的航空插座,到达目的地后,免除机器人在拖车的装卸程序,直接通过支撑拖车千斤顶,然后再打开机器人开关,迅速实现拖车变身机器人的功能。加上拖车机器人上方甲板平台属于通用化、模块化设计,可以很方便的搭载安装不同任务模块,实现各种功能,满足各种需要。
本发明通过以下技术方案实现:一种轮毂电机型自发电消防灭火拖车机器人,包括拖车支架;所述拖车支架前端设有拖车连接器和带轮拖车千斤顶;在拖车支架的两侧分别设有左车轮、右车轮;所述左车轮、右车轮分别通过悬挂与拖车支架连接;
所述左车轮、右车轮分别连接有轮毂型电机;所述轮毂型电机通过切换继电器连接有一个电机驱动器和一个发电控制器,电机驱动器连接有机器人控制器;
所述拖车支架下固定有控制箱,所述电机驱动器、机器人控制器、发电控制器安装在控制箱内;
在所述拖车支架下还固定有用于向控制箱内电机驱动器供电的电池箱;发电控制器连接电池箱;
所述拖车支架的甲板平台开设有多个均匀分布的固定孔;固定孔是对称式或矩阵式排列;甲板平台上通过固定孔安装有消防水炮。
其进一步是:从所述轮毂型电机到发电控制器到电池箱的回路中,设置有发电开关;所述电机驱动器和机器人控制器连接电池箱;所述电池箱连接有充电口;所述发电控制器为MTTP发电控制器。
所述机器人控制器连接有固定在拖车支架上的天线;所述天线通过无线连接有机器人遥控器;所述天线包括一个负责与机器人遥控器收发信号的无线通讯天线,和一个负责传输图像到机器人遥控器的影音传输天线。
所述拖车支架的前后侧分别安装有摄像头。
所述拖车支架的甲板平台上设有凹型信号坑或凸型信号塔;所述凹型信号坑或凸型信号塔中安装有航空插座;所述航空插座连接到机器人控制器,航空插座还连接有一个对外电机驱动器,对外电机驱动器与机器人控制器相连。
所述左车轮、右车轮共设有一对、两对、或者两对以上。
所述悬挂为独立悬挂或非独立悬挂。
所述悬挂为弹簧钢板或者扭力轴。
所述轮毂电机为永磁无刷轮毂电机。
消防水炮为水力自摆炮。
消防水炮自摆自发电消防水炮。
与现有技术相比,本发明的有益效果是:
1、提高拖车和牵引车的刹车性能:采用该轮毂电机型自发电消防灭火拖车机器人,在刹车时,可以闭合发电开关,利用动力电机发电时产生的阻力,来辅助降低车速,提高安全性;
2、本发明还具有下坡安全缓降功能:经常开大卡的司机都非常害怕下坡路段,因为极容易出现刹车失灵等事故。出现刹车失灵或失控的事故,除了制动系统疏于保养之外,非常重要的一个原因就是,下坡时满载的拖车可能会推着前面的卡车走,从而产生折叠效应,导致货车失控。而本发明的拖车发电系统,则能有效防范这种情况,当司机在下坡的时候,可以提前启动这套系统。打开拖车发电开关之后,拖车的发电制动功能就会启动,从而使拖车和货车之间慢慢拉开距离,以起到减速和拉伸的目的,只要有拖车拖着后退,车头就能更好的转向,而且也不会影响车轮的锁死和防滑能力,这对于正在下坡的司机来说,无疑是救了一命。
3、实现拖车的短距离自主行走,满足拖车停车后短距离挪动位置的需求;
4、解决移动机器人常见的户外充电难题,可以实现被拖拽时的边走边充功能,不仅能将户外拖拽移动产生的能量得以收集,还能充分利用的拖车机器人被拖拽移动时的宝贵时间。因为大家都知道,充电是需要时间的,这在户外紧张的任务环境下尤其宝贵;
5、解决传统移动机器人的装卸不便难题,免除机器人与车辆之间宝贵的装卸时间。解除发电开关与前车的控制信号(刹车和发电开关信号)连接,再与牵引车脱离牵引后,放下带轮千斤顶,然后只需打开机器人开关,拖车就能变成一台遥控机器人。反之,关闭机器人开关,把拖车机器人用拖车连接器直接连接前面的牵引动力车,把发电开关对接好与前车的控制信号(刹车和发电开关信号),实现控制,即可实现快捷装卸,迅速转移。
6、实现拖车机器人的多功能化:由于采用大量定位孔和凹型信号坑或凸型信号塔的多功能甲板技术,可以很方便的将拖车机器人变成一个移动机器人甲板平台,可以在甲板平台上任意安装各种模块,实现模块化多功能的机器人。
7、降低重心,提高运输安全性:由于拖车底盘和移动机器人底盘合二为一,不仅大大降低了拖车重心,还大大降低了整车质量,降低了运输由于颠簸等因素造成的的事故率,一举多得,利国利民。
8、本发明采用了轮毂电机方案,具有结构简单、整机零部件少、生产和维修方便等特点。
9、本发明的采用了自摆自发电消防水炮,可以在灭火的时候利用水压,带动水轮机旋转发电,从而产生源源不断的能量补充。
附图说明
图1是本发明实施例一主视图;
图2是本发明实施例一俯视图;
图3是本发明实施例一立体结构示意图;
图4是本发明实施例一电路控制图;
图5是本发明实施例一加装水炮后的立体结构示意图。
图中:1、拖车支架;2、拖车连接器;3、带轮拖车千斤顶;4、左车轮;5、右车轮;6、悬挂;7、轮毂电机;8、控制箱;9、电池箱;10、排孔;11、天线;12、凹型信号坑;15、甲板平台;16、消防水炮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
如图1、图2、图3和图4所示,一种轮毂电机型自发电消防灭火拖车机器人,拖车支架1前端设有拖车连接器2和带轮拖车千斤顶3;拖车连接器2可以是一个小钩子,带轮拖车千斤顶3可以采用万向轮。左车轮4、右车轮5分别通过悬挂6连接在拖车支架1的两侧;悬挂6为独立悬挂或非独立悬挂,具体的,悬挂6可以是弹簧钢板、扭力轴等。左车轮4、右车轮5成对设置,可以是一对、两对、或者两对以上。
左车轮4、右车轮5连接有轮毂电机7;轮毂电机7通过切换继电器连接有一个电机驱动器和一个MTTP发电控制器,电机驱动器连接有机器人控制器;切换继电器未上电时,动力电机与MTTP发电控制器相连接;切换继电器上电时,让动力电机与电机驱动器相连接;拖车支架1下固定有控制箱8,电机驱动器、机器人控制器、MTTP发电控制器安装在控制箱8内;在拖车支架1下还固定有用于控制箱8内电机驱动器供电的电池箱9;MTTP发电控制器连接电池箱9。
拖车支架1的前后侧分别安装有摄像头。机器人控制器连接有固定在拖车支架1上的天线11;天线11包括一个负责与机器人遥控器收发信号的无线通讯天线,和一个负责传输图像到机器人遥控器的影音传输天线。天线11通过无线连接有机器人遥控器。这样,通过机器人遥控器就可以实现模块化自发电拖车机器人的远程控制。拖车支架1的前后侧的摄像头,便于在行走时观察。
拖车支架1上表面有甲板平台15,甲板平台15上开设有矩阵式排列的排孔10,通过排孔10便于与其他功能模块连接,以实现其他特定功能。
如图5所示,甲板平台15上通过固定孔10安装有消防水炮16,连接水炮后,可以进行灭火等功能。消防水炮采用水力自摆炮或者自摆自发电消防水炮。
拖车支架1上表面设有用于安装通讯接口的凹型信号坑12。凹型信号坑12中可以安装航空插座,航空插座安装好以后,与拖车支架1上表面高度一致,或略低于拖车支架1上表面。或者,在拖车支架1上表面安装信号塔,信号塔上安装航空插座。航空插座连接到机器人控制器,航空插座还连接有一个对外电机驱动器。航空插座用于与功能模块通讯和供电,实现灭火、排烟、排爆等机器人功能的实用化多功能拓展。
拖车机器人可以在遥控下,实现自行走功能。具体为控制箱内无线控制器的收到天线传来的无线控制信号后,向电机驱动器发出控制信号,然后电机驱动器向左右两侧轮毂电机发送驱动电流,轮毂电机旋转,然后通过直驱方式,实现轮毂的受控运动,依托辅助的带轮拖车千斤顶进行整机平衡,最终实现机器人的底盘行走。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
“中队有我,有我必胜!”电影《烈火英雄》发终极预告决战火海
《烈火英雄》火场遗言——我们在这里等死吗?我不能死啊!队长!
第七日 福岛留守核电站死士写信与家人诀别
日本福岛核电站50人死士诀别书曝光
真正的世纪浩劫,一口气看完《切尔诺贝利》
核电站消防员,口吐鲜血的灭火。
手套遇到石墨马上融化。浑身器官衰竭
1986年4月26日,发生在苏联统治下乌克兰境内切尔诺贝利核电站事故,被认为是人类历史上最严重的核电事故。大量高能辐射物质扩散到大气层中,这些辐射尘涵盖了大半个欧洲。
首批进入抢险的军人中,27人很快死亡。
而且参加清理工作的不只是苏联红军,参与抢险的军民总共有60万人,
至少有4000人直接因此而死亡,另有2万人在这二十多年中痛苦死亡,还有20万人宣告残障,痛苦度过余生。
经济上,这场灾难总共损失大概两千亿美元,因此也有认为这次事故是压垮苏联红色帝国的稻草。
https://v.qq.com/x/page/u0330ruhwfy.html
机器人没电了会是什么姿势,一起来看看吧!已笑疯!
你想去给熊熊烈焰旁边的消防机器人换电池和装履带?
做梦了吧!痴心妄想!谁来给你换?快醒醒!
水炮部分

技术领域
本实用新型涉及一种水炮机器人,更具体地说,涉及一种可控自摆角度的永动型水炮机器人。
背景技术
传统遥控消防水炮存在忘了充电的难题,曾经去过一个消防特勤中队,拿出来的遥控消防水炮居然忘了充电!于是等于半个废铁!而且这是法国进口的名牌消防水炮。
目前的消防水炮分为两种,一种是水力自摆水炮,一种是电动遥控水炮。其中,水力自摆水炮上水就在设定的范围内循环工作,无法远距离控制灭火的位置和灭火的范围,一旦固定,就无法远程调整,给消防官兵带来很大的安全隐患。同时也造成了很大的灭火剂的浪费。如果再次调整灭火范围,则消防官兵需要再次暴露在高危险的工作环境下。另外一种是电动遥控水炮,优点是可以远程遥控,灭火范围精准,但是由于水炮不能固定在一个范围内灭火,否则这个着火点灭火结束后,再次喷洒就是浪费。所以电动遥控水炮需要设定往复工作模式,通过电动机的旋转,带动水炮炮头左右往复摆动,提高有效灭火范围。但是这样造成了很大的电源消耗。同时,这样也出现了电控水炮的使用工作时间问题。频繁的充电工作,也给消防部队带来了无限的烦恼。
发明内容
1.实用新型要解决的技术问题
本实用新型的目的在于克服上述的不足,提供了一种可控自摆角度的永动型水炮机器人,采用本实用新型的技术方案,设计巧妙,功能完善,充分利用了消防水的能量,让水炮实现自摆动作,同时利用消防水的动能,进行自发电为消防水炮工作供电,实现消防水炮的免充电连续工作,为消防部队提供了极大的便利,另外通过控制摆臂装置,实现消防水炮摆动范围可调的目的。
相信我们的自发电自摆消防水炮,可以超过法国的电控消防水炮!
2.技术方案
为达到上述目的,本实用新型提供的技术方案为:
本实用新型的一种可控自摆角度的永动型水炮机器人,包括安装在安装座上的水轮机,所述的水轮机的出水口通过水轮机出水球头、水炮双活动关节与水炮头;与水炮装置的进水口相连通;所述的水炮头上设有“L”字形支架,水炮双活动关节上设有关节支架,关节支架与“L”字形支架通过用于控制水炮头俯仰角度的电动推杆一相连;所述的水轮机包括水轮轴,所述的水轮轴的右端连接于减速机的侧面,减速机底面的输出轴通过偏心机构与用于控制水炮装置左右摆动幅度的摆臂装置相连;所述的摆臂装置包括垂直于水轮机方向设置的用于调整水炮头摆幅的电动推杆二和自关节支架右侧面延伸出的摆臂,所述的摆臂上沿着摆臂长度方向开设有导向槽;所述的摆臂上套设有沿摆臂长度方向滑动的摆臂滑套,摆臂滑套上对应导向槽位置处设置有与导向槽滑动配合的导向销;所述的电动推杆二的一端与摆臂滑套固连,电动推杆二的另一端固定安装在关节支架上;所述的偏心机构包括套设在减速机底面输出轴上的转盘、转盘偏心轴和牵引连杆;所述的转盘偏心轴的一端连接于转盘上,转盘偏心轴的另一端与牵引连杆的一端铰连接,牵引连杆的另一端与上述的导向销铰连接。
更进一步地,所述的水轮机的进水口处设置有以便消防水能够正对水轮机内水轮叶轮方向进入的分水片。
更进一步地,所述的水轮轴的左端通过同步传动装置与发电机的旋转轴相连;所述的同步传动装置由同步从动轮、同步主动轮和同步带构成;发电机与用于控制电机工作的控制箱内电池相连;所述的同步传动装置由同步从动轮、同步主动轮和同步带构成。
更进一步地,所述的水轮轴的左端穿过同步传动装置内的同步主动轮后与设置于同步传动装置外的手轮相连。
更进一步地,所述的水炮头包括炮头体、出水调节挡块、芯轴和水炮芯,所述的炮头体由炮头安装管和设于炮头安装管出水端口处的斜面喷口构成,所述的炮头体的上端端口为出水口,出水口的截面沿出水方向变大;所述的出水调节挡块悬空于出水口内,且出水调节挡块对应出水口的下部的截面沿出水方向变大,所述的出水调节挡块的轴线上贯穿有芯轴,芯轴的下端固定在炮头体内,芯轴的上端穿过出水调节挡块后与水炮芯固连;所述的水炮芯的外周面加工有螺旋状滑槽,滑槽的一端向下延伸贯穿水炮芯下端面形成放行槽,滑槽的另一端向上弯折形成卡止槽,滑槽的上侧壁向上凹陷形成多个档位槽;所述的出水调节挡块的上部沿轴线开设有用于安装上述水炮芯的盲孔,盲孔侧壁上设有销轴,该销轴自放行槽进入滑槽内,可沿滑槽滑动并可通过上述档位槽或卡止槽卡止;所述的出水调节挡块的下端与芯轴的台阶之间设置有弹簧;所述的炮头体内设置有芯轴固定支架,芯轴固定支架的结构形状为米字型或十字型或Y字型;所述的芯轴固定支架上设有用于安装芯轴的安装孔,安装孔的轴线与炮头安装管的轴线重叠;所述的芯轴的下端穿过上述安装孔固定,且芯轴下端穿过芯轴固定支架部分连接有椭圆形超空泡分水器。
更进一步地,所述的水轮机的出水管侧壁上设有喷雾头。
更进一步地,所述的炮头体的出水口端外套设有可调节喷水形状的喷口外套,喷口外套与炮头安装管通过电动推杆三相连。
更进一步地,所述的炮头安装管的自由端内配合安装有水炮双活动关节的出水端并通过上下对称设置的转轴螺丝铰连接,水炮双活动关节的进水端内配合安装有水轮机出水球头的自由端并通过上下对称设置的转轴螺丝铰连接,水轮机出水球头的固定端安装于水轮机的出水口处。
更进一步地,所述的炮头安装管的自由端和水炮双活动关节的进水端均为以转轴螺丝为轴心的凹旋转体面端,所述的水炮双活动关节的出水端和水轮机出水球头的自由端均为以转轴螺丝为轴心的凸旋转体面端,凸旋转体面端配合安装在凹旋转体面端内。
更进一步地,所述的水轮机的进水口处安装有水管母头,水管母头的自由端内配合安装有水管公头的自由端并通过上下对称设置的转轴螺丝铰连接。
3.有益效果
采用本实用新型提供的技术方案,与已有的公知技术相比,具有如下有益效果:
(1)本实用新型一种可控自摆角度的永动型水炮机器人,其水炮头上设有“L”字形支架,水炮双活动关节上设有关节支架,关节支架与“L”字形支架通过电动推杆一相连,利用电动推杆一控制水炮头俯仰角度;
(2)本实用新型一种可控自摆角度的永动型水炮机器人,其减速机底面的输出轴通过偏心机构与用于控制水炮装置左右摆动幅度的摆臂装置相连,摆臂装置包括垂直于水轮机方向设置的电动推杆二和自关节支架右侧面延伸出的摆臂,摆臂上沿着摆臂长度方向开设有导向槽,摆臂上套设有沿摆臂长度方向滑动的摆臂滑套,摆臂滑套上对应导向槽位置处设置有与导向槽滑动配合的导向销,电动推杆二的一端与摆臂滑套固连,电动推杆二的另一端固定安装在关节支架上,通过电动推杆二的伸缩来带动摆臂滑套滑动,调节导向销与水炮双活动关节下端活动点之间的距离,进而改变通过偏心机构控制的消防水炮的炮头摆动范围,使得消防水炮的炮头摆动范围实现了可控、节水;
(3)本实用新型一种可控自摆角度的永动型水炮机器人,其水轮机的进水口处设置有以便消防水能够正对水轮机内水轮叶轮方向进入的分水片,使得消防水冲击叶轮的位置更精准,发电效率更高;
(4)本实用新型一种可控自摆角度的永动型水炮机器人,其水轮轴的左端通过同步传动装置与发电机的旋转轴相连,同步传动装置由同步从动轮、同步主动轮和同步带构成,实现发电的目的;
(5)本实用新型一种可控自摆角度的永动型水炮机器人,其出水调节挡块的轴线上贯穿有芯轴,芯轴的下端固定在炮头体内,芯轴的上端穿过出水调节挡块后与水炮芯固连,水炮芯的外周面形成有螺旋状滑槽,滑槽的一端向下延伸贯穿水炮芯下端面形成放行槽,滑槽的另一端向上弯折形成卡止槽,滑槽的上侧壁向上凹陷形成多个档位槽,出水调节挡块的上部沿轴线开设有用于安装上述水炮芯的盲孔,盲孔侧壁上设有销轴,该销轴自放行槽进入滑槽内,可沿滑槽滑动并可通过上述档位槽或卡止槽卡止,出水调节挡块的下端与芯轴的台阶之间设置有弹簧,水炮芯的结构简单,设计巧妙,只需旋转出水调节挡块使得销轴沿着水炮芯上的滑槽轨迹运动即可调节出水流量,改变水柱的流量和喷射距离,增强灭火效果,而在滑槽的上侧壁向上凹陷形成多个档位槽,档位的设计简单,方便,而档位的调节操作方便,适应性更强,灭火效果更佳;
(6)本实用新型一种可控自摆角度的永动型水炮机器人,其炮头体的出水口端外套设有可调节喷水形状的喷口外套,喷口外套与炮头安装管通过电动推杆三相连,通过上下滑动喷口外套来改变喷水形状,操作方便;
(7)本实用新型一种可控自摆角度的永动型水炮机器人,其炮头体内设置有芯轴固定支架,芯轴固定支架的结构形状为米字型或十字型或Y字型,芯轴固定支架上设有用于安装芯轴的安装孔,安装孔的轴线与炮头安装管的轴线重叠,以便于芯轴的插入定位;
(8)本实用新型一种可控自摆角度的永动型水炮机器人,其芯轴下端穿过芯轴固定支架部分连接有椭圆形超空泡分水器,进入炮头体内的高速水经椭圆形超空泡分水器,形成一个环绕在芯轴周围的、中间充满空气的环形水柱,减少水的阻力,水流通畅;
(9)本实用新型一种可控自摆角度的永动型水炮机器人,其炮头安装管的自由端内配合安装有水炮双活动关节的出水端并通过上下对称设置的转轴螺丝铰连接,水炮双活动关节的进水端内配合安装有水轮机出水球头的自由端并通过上下对称设置的转轴螺丝铰连接,水轮机出水球头的固定端安装于水轮机的出水口处,水炮双活动关节和水轮机出水球头可以左右摇摆,避免柔性水管在工作中因易被折断而漏水,也可明显降低消防机器人转弯时由于需要强硬弯折高压消防水管而产生的无谓的动力消耗和电力损耗,同时水进入炮头安装管和水炮双活动关节的流道设计简单,具有连接处对消防水的水阻最小的效果,最终实现对消防机器人的节能且高效利用水压,防止接头处水管破损断落的效果;
(10)本实用新型一种可控自摆角度的永动型水炮机器人,其炮头安装管的自由端和水炮双活动关节的进水端均为以转轴螺丝为轴心的凹旋转体面端,水炮双活动关节的出水端和水轮机出水球头的自由端均为以转轴螺丝为轴心的凸旋转体面端,凸旋转体面端配合安装在凹旋转体面端内,确保转动时不会出现漏水的问题;
(11)水轮机的进水口处安装有水管母头,水管母头的自由端内配合安装有水管公头的自由端并通过上下对称设置的转轴螺丝铰连接,水管公头可以左右摇摆,避免柔性水管在工作中因易被折断而漏水,也可明显降低消防机器人转弯时由于需要强硬弯折高压消防水管而产生的无谓的动力消耗和电力损耗,同时水进入水管母头的流道设计简单,具有连接处对消防水的水阻最小的效果,最终实现对水炮机器人消的节能且高效利用水压,防止接头处水管破损断落的效果;
(12)本实用新型一种可控自摆角度的永动型水炮机器人,其水轮机的出水管侧壁上设有喷雾头,实现对水炮周围的降温作用,保护精密且不耐高温的电控电路和电池系统。
附图说明
图1为本实用新型的一种可控自摆角度的永动型水炮机器人的立体示意图;
图2为本实用新型的一种可控自摆角度的永动型水炮机器人的俯视图;
图3为本实用新型的一种可控自摆角度的永动型水炮机器人的左视图;
图4为本实用新型中水炮头的剖视图;
图5为本实用新型中水炮芯的示意图;
图6为本实用新型中水轮机进水口处的剖视图。
示意图中的标号说明:1、安装座、2、水轮机;31、炮头安装管;32、斜面喷口;33、喷口外套;34、出水调节挡块;341、盲孔;35、水炮芯;351、滑槽;352、放行槽;353、卡止槽;354、档位槽;36、芯轴;37、芯轴固定支架;38、弹簧;39、分水器;4、水炮双活动关节; 5、电动推杆一;6、支架;7、关节支架;71、摆臂;711、导向槽;72、摆臂滑套;73、导向销;74、电动推杆二;8、减速机;91、转盘;92、转盘偏心轴;93、牵引连杆;10、分水片;11、发电机;12、电动推杆三;13、转轴螺丝;14、水轮机出水球头;15、同步传动装置;16、水管母头;17、手轮;18、水管公头;19、喷雾头。
具体实施方式
为进一步了解本实用新型的内容,结合附图和实施例对本实用新型作详细描述。
实施例
结合图1、图2和图3,本实施例的一种可控自摆角度的永动型水炮机器人,包括安装在安装座1上的水轮机2,水轮机2的出水口通过水轮机出水球头14、水炮双活动关节4与水炮头;
水炮头(参见图4所示)包括炮头体、出水调节挡块34、芯轴36和水炮芯35,炮头体由炮头安装管31和设于炮头安装管31出水端口处的斜面喷口32构成,炮头体的出水口端外套设有可调节喷水形状的喷口外套33,喷口外套33与炮头安装管31通过电动推杆三12相连,通过上下滑动喷口外套33来改变喷水形状,操作方便;炮头体的上端端口为出水口,出水口的截面沿出水方向变大;出水调节挡块34悬空于出水口内,且出水调节挡块34对应出水口的下部的截面沿出水方向变大,出水调节挡块34的轴线上贯穿有芯轴36,芯轴36的下端固定在炮头体内,芯轴36的上端穿过出水调节挡块34后与水炮芯35固连;水炮芯35的外周面加工有螺旋状滑槽351,滑槽351的一端向下延伸贯穿水炮芯35下端面形成放行槽352,滑槽351的另一端向上弯折形成卡止槽353,滑槽351的上侧壁向上凹陷形成多个档位槽354(参见图5所示);出水调节挡块34的上部沿轴线开设有用于安装上述水炮芯35的盲孔341,盲孔341侧壁上设有销轴,该销轴自放行槽352进入滑槽351内,可沿滑槽351滑动并可通过上述档位槽354或卡止槽353卡止;出水调节挡块34的下端与芯轴36的台阶之间设置有弹簧38;水炮芯35的结构简单,设计巧妙,只需旋转出水调节挡块34使得销轴沿着水炮芯35上的滑槽351轨迹运动即可调节出水流量,改变水柱的流量和喷射距离,增强灭火效果,而在滑槽351的上侧壁向上凹陷形成多个档位槽354,档位的设计简单,方便,而档位的调节操作方便,适应性更强,灭火效果更佳;
炮头体内设置有芯轴固定支架37,芯轴固定支架37的结构形状为米字型或十字型或Y字型;芯轴固定支架37上设有用于安装芯轴36的安装孔,安装孔的轴线与炮头安装管31的轴线重叠,以便于芯轴36的插入定位;芯轴36的下端穿过上述安装孔固定,且芯轴36下端穿过芯轴固定支架37部分连接有椭圆形超空泡分水器39,形成一个环绕在芯轴36周围的、中间充满空气的环形水柱,减少水的阻力,水流通畅;
炮头安装管31的自由端内配合安装有水炮双活动关节4的出水端并通过上下对称设置的转轴螺丝13铰连接,水炮双活动关节4的进水端内配合安装有水轮机出水球头14的自由端并通过上下对称设置的转轴螺丝13铰连接,水炮双活动关节4和水轮机出水球头14可以左右摇摆,避免柔性水管在工作中因易被折断而漏水,也可明显降低消防机器人转弯时由于需要强硬弯折高压消防水管而产生的无谓的动力消耗和电力损耗,同时水进入炮头安装管31和水炮双活动关节4的流道设计简单,具有连接处对消防水的水阻最小的效果,最终实现对消防机器人的节能且高效利用水压,防止接头处水管破损断落的效果;本实施例中炮头安装管31的自由端和水炮双活动关节4的进水端均为以转轴螺丝13为轴心的凹旋转体面端,水炮双活动关节4的出水端和水轮机出水球头14的自由端均为以转轴螺丝13为轴心的凸旋转体面端,凸旋转体面端配合安装在凹旋转体面端内,确保转动时不会出现漏水的问题;水轮机出水球头14的固定端安装于水轮机2的出水口处,水轮机2的出水管侧壁上设有喷雾头19,实现对水炮周围的降温作用,保护精密且不耐高温的电控电路和电池系统;
水炮头上设有“L”字形支架6,水炮双活动关节4上设有关节支架7,关节支架7与“L”字形支架6通过用于控制水炮头俯仰角度的电动推杆一相连;水轮机2包括水轮轴,水轮轴的右端连接于减速机8的侧面,减速机8底面的输出轴通过偏心机构与用于控制水炮装置左右摆动幅度的摆臂装置相连;摆臂装置包括垂直于水轮机方向设置的用于调整水炮头摆幅的电动推杆二10和自关节支架7右侧面延伸出的摆臂71,摆臂71上沿着摆臂71长度方向开设有导向槽711;摆臂71上套设有沿摆臂71长度方向滑动的摆臂滑套72,摆臂滑套72上对应导向槽711位置处设置有与导向槽711滑动配合的导向销73;电动推杆二74的一端与摆臂滑套72固连,电动推杆二74的另一端固定安装在关节支架7上,通过电动推杆二74的伸缩来带动摆臂滑套72滑动,调节导向销73与水炮双活动关节4下端活动点之间的距离,进而改变通过偏心机构控制的消防水炮的炮头摆动范围,使得消防水炮的炮头摆动范围实现了可控、节水;偏心机构包括套设在减速机8底面输出轴上的转盘91、转盘偏心轴92和牵引连杆93;转盘偏心轴92的一端连接于转盘91上,转盘偏心轴92的另一端与牵引连杆93的一端铰连接,牵引连杆93的另一端与上述的导向销73铰连接,结构简单,设计巧妙,利用偏心机构控制炮头左右摆动;利用消防水的流动带动水轮机2的旋转,水轮机2再把旋转扭矩传递给减速机8,使得减速机8下部的偏心转盘也进行旋转,然后通过牵引连杆93带动具有摆臂71的关节支架7运动,进而实现水炮头的左右连续摆动,而在牵引连杆93运动,推拉长度不变的情况下,通过电动推杆二74改变摆臂力臂的长短,实现水炮头左右摆动角度的变化,使得水炮头摆动角度范围实现了远程可变可控、避免灭火水柱左右方向过大的覆盖范围,实现节水效果,同时由于带动水炮头摆动的偏心机构能量来自消防水流动转换出来的动力,无需耗电,实现了明显节能,电动推杆二74只是在需要改变控制角度大小的时候运动一次,平时完全不耗电,故用电能量可以忽略不计;
水轮轴的左端通过同步传动装置15与发电机11的旋转轴相连,充分利用能源实现发电的目的;同步传动装置15由同步从动轮、同步主动轮和同步带构成;水轮轴的左端穿过同步传动装置15内的同步主动轮后与设置于同步传动装置15外的手轮17相连,可通过手动控制手轮17带动偏心机构进而控制炮头左右摆动;
(参见图6所示)水轮机2的进水口处设置有以便消防水能够正对水轮机2内水轮叶轮方向进入的分水片10;水轮机2的进水口处安装有水管母头16,水管母头16的自由端内配合安装有水管公头18的自由端并通过上下对称设置的转轴螺丝13铰连接,本实施例中水管母头16的自由端为以转轴螺丝13为轴心的凹旋转体面端,水管公头18的自由端以转轴螺丝13为轴心的凸旋转体面端,凸旋转体面端配合安装在凹旋转体面端内,水管公头18可以左右摇摆,避免柔性水管在工作中因易被折断而漏水,也可明显降低消防机器人转弯时由于需要强硬弯折高压消防水管而产生的无谓的动力消耗和电力损耗,同时水进入水管母头的流道设计简单,具有连接处对消防水的水阻最小的效果,最终实现对水炮机器人消的节能且高效利用水压,防止接头处水管破损断落的效果。
本实用新型的一种可控自摆角度的永动型水炮机器人,功能完善,能实现可调流量,远程遥控灭火范围大小、灭火水柱远近、水柱形状,同时无需充电工作,实现水炮机器人的免维护免充电,非常适应消防部队的实战需求。
以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。

特点:水力+遥控+自发电,混合动力型+自发电
到达火场后,可以进入节能休眠状态,除非需要水炮俯仰角度的调整,一般情况下依靠消防水冲击水轮机,牵引水炮炮头左右摇摆,进行低功耗工作,可以连续工作200小时以上。
开启自发电功能后,可以无限时工作!
1.【水力运动】消防水炮使用到达火场后,左右摇摆运动,其实并不依赖电力,而是借助消防水炮消防水炮结构内的一个水轮机,被消防水冲击旋转后,带动传动机构运动,最终实现消防水炮炮头的无电力左右摆动,实现无需电力的大范围灭火。
2.【水力发电】消防水炮已经实现水力发电,发电功率在75W到300W左右,解决了消防消防水炮几天几夜灭火工作时的电力弥补难题。灭火的时候,消防水炮电流消耗在10W以下,能够实现长时间灭火时的能量补充问题。
3.【水炮摆尾节能】专利的水炮活动摆尾,大大减少消防水炮底盘转动时,高压水带对消防水炮的影响。
4.【摆动角度大小可以电控】专利的可以电控调节摆动角度的设计,实现水炮炮头左右摇摆的范围,也变得可大可小(通过改变水炮摆臂的力臂长短,但是牵引行程没有变,从而实现可调摆动角度)
5.【可调流量】可调流量的水炮设计,使得灭小火,可以调节到小流量,节水,低消防废水排放。大火灾可以调成大水流,迅速灭火。
超级消防部队用超级自发电消防水炮-演示视频:
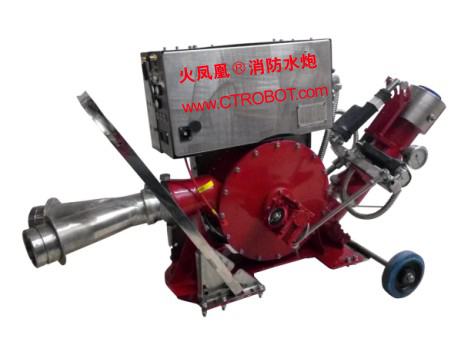
型号规格:PSKDY80-CTSD
左右角度:24~40度(可遥控)
上下角度:+30~+70
流量范围:80 L/S
喷射压力:≦1.0MP
允许最大压力:≦1.4MP
水力发电供水压力:0.75MP~1.2MP
最大射程:≥70M
最大喷雾角:110度
电量反馈灯:4个
外形尺寸:1160*570*630
重量:72 KG
水管接头:ND80
控制器型号:WP8-8
通讯距离:≥2KM
通讯频率:8个
支持4G图传!(可选)