



【科幻】模块化可折叠方向盘和驾驶室的变形消防排烟机器人-单兵轮履式多功能外骨骼机器人

从未来而言,无人驾驶是各种未来自动驾驶车辆的主要方向。但是目前的无人驾驶车辆,存在有驾驶室和无驾驶室的明显界限。
有驾驶室的,使用方便,可以载遥控驾驶员一起前进,有效提高了无人车机器人的行进速度。
无驾驶室的,整体尺寸小,但是遥控兵不方便。
在无人车和机器人方面,目前无人车与机器人行业其实界限非常明显。无人车主要是载人,而机器人则没有载人的。
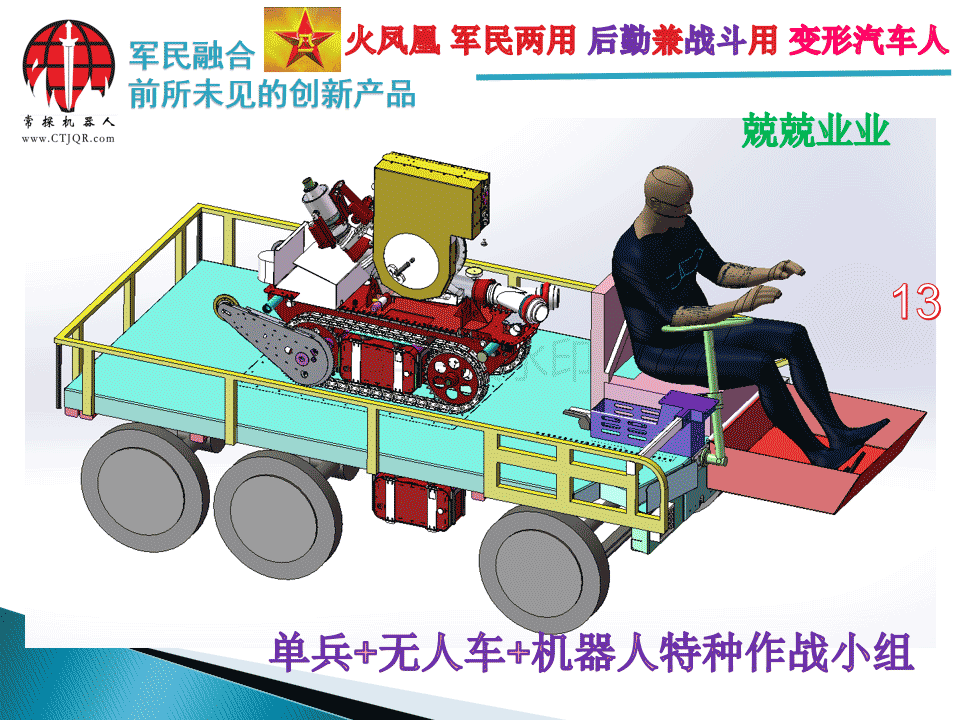
另外,目前机器人行业,大部分设计为单一功能,没有进行前沿的模块化设计,使得机器人平台可以快速切换消防灭火、排爆抢险、排烟、运输、环卫等多种功能。存在功能单一,平台不能共用的缺点。
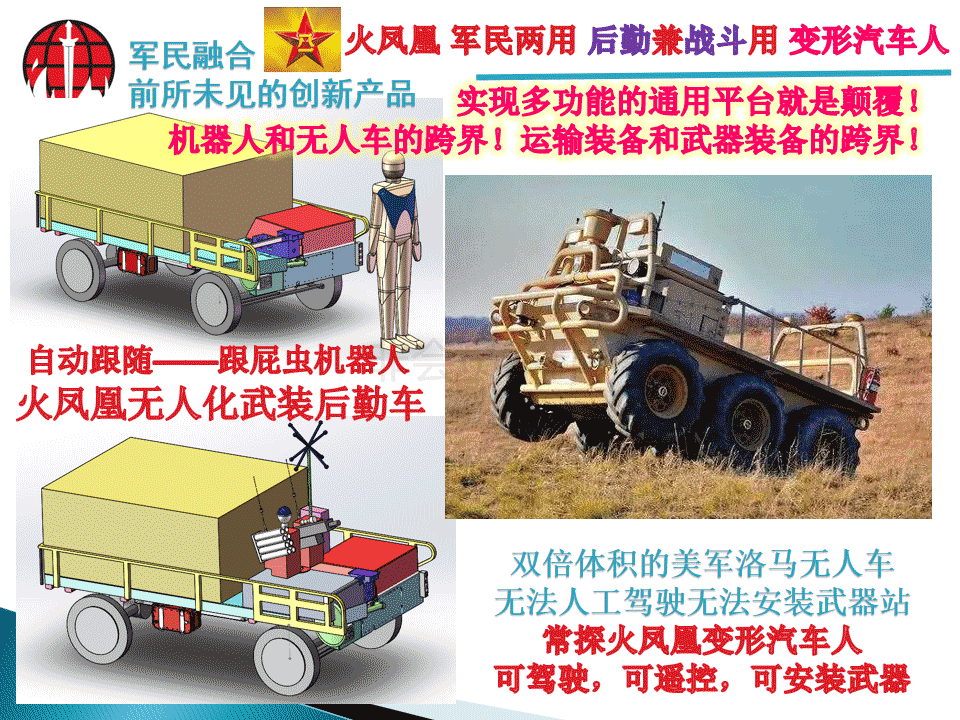
常探机器人的模块化无人车机器人,
解决了机器人行业的不能模块化多功能通用的痛点问题,解决了机器人行业的不能载遥控驾驶员共同前进,提高部署速度的痛点;
解决了无人车行业,驾驶室占用空间和体积过大的痛点;解决了无人车行业,普遍性用来单一载客,不能进行排爆灭火等特种应用的痛点;
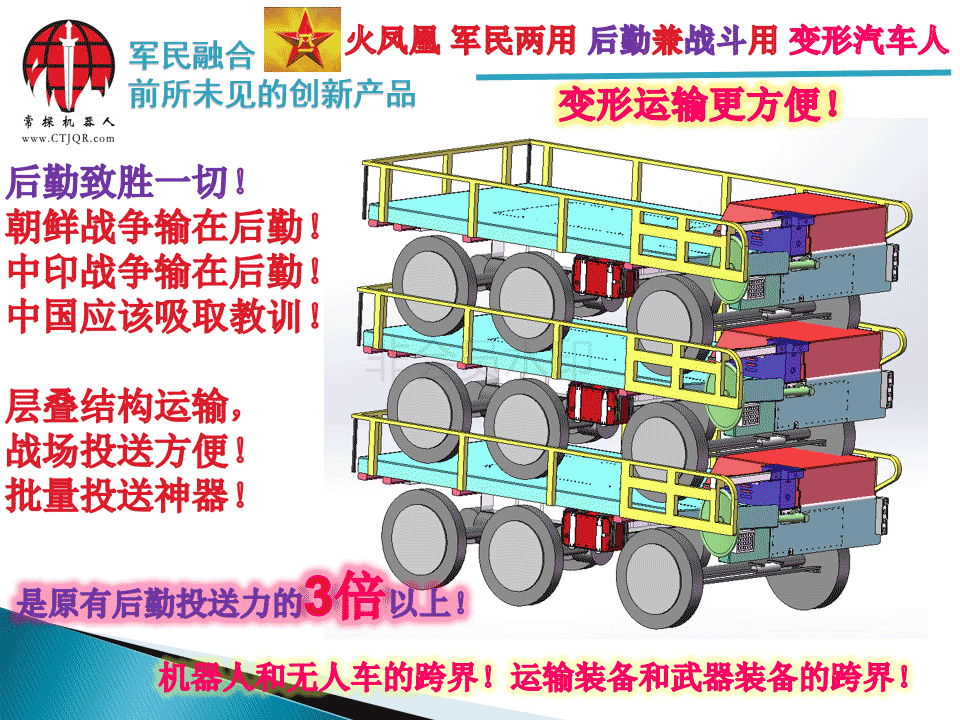
是一种跨机器人、无人车、有人车,三大基础平台和数十种行业共同痛点的划时代黑科技新产品!
一体化的设计会将【机器人】性能牢牢套死在当前的廉价附件性能水平之下。
相反,只要能得到高性能附件的支持,即使老旧【机器人】平台也能换发新春。
参考产品:世界500强,通用动力专为陆军部队开发的“救灾英雄”
注意,我司该项目研发时间是2017年夏季,专为中印边境摩擦而突击开发,设计定位:单兵轮式多功能外骨骼机器人。
时间早于美国通用。
【科幻】单兵轮履式多功能外骨骼机器人
模块化可折叠方向盘和驾驶室的变形消防排烟机器人
轮式、履带式,皆可

常探火凤凰---模块化自驾型变形自发电消防机器人【专利发明技术】
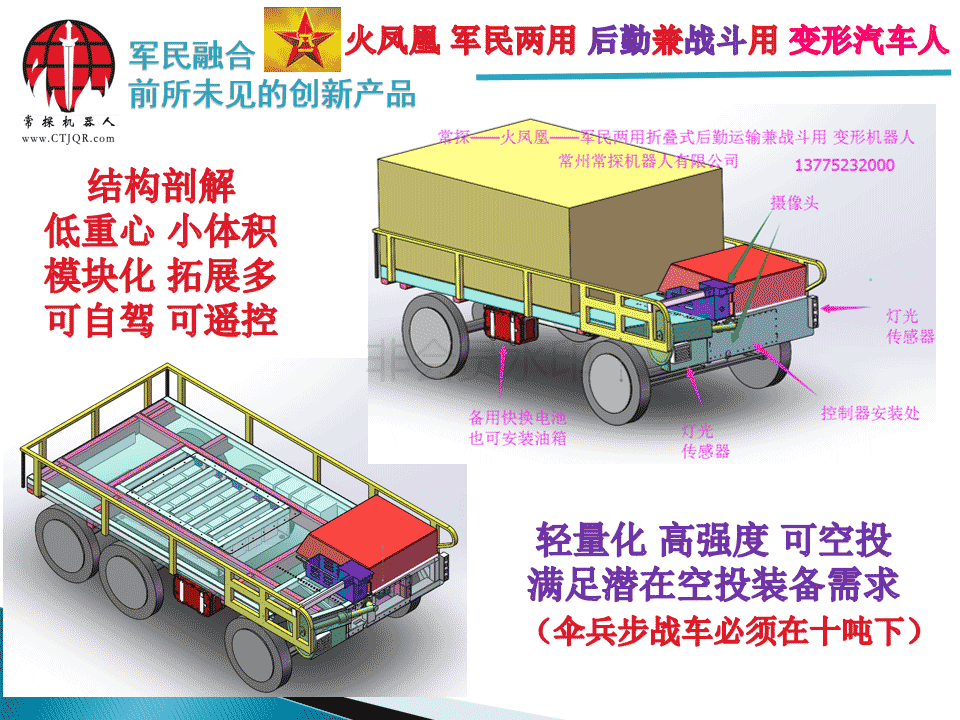
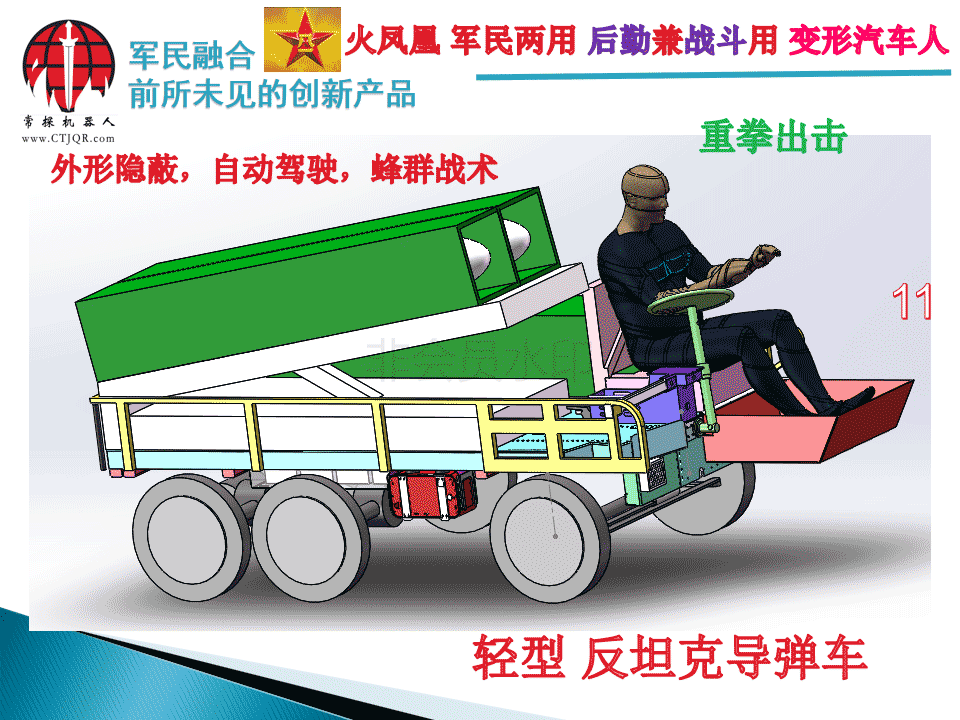
(驾驶室可折叠隐形,电子方向盘可以隐形,专利的模块化积木式平台)
【电动方案,能通过灭火时自发电,避免燃油机器人燃油烧尽阵亡】
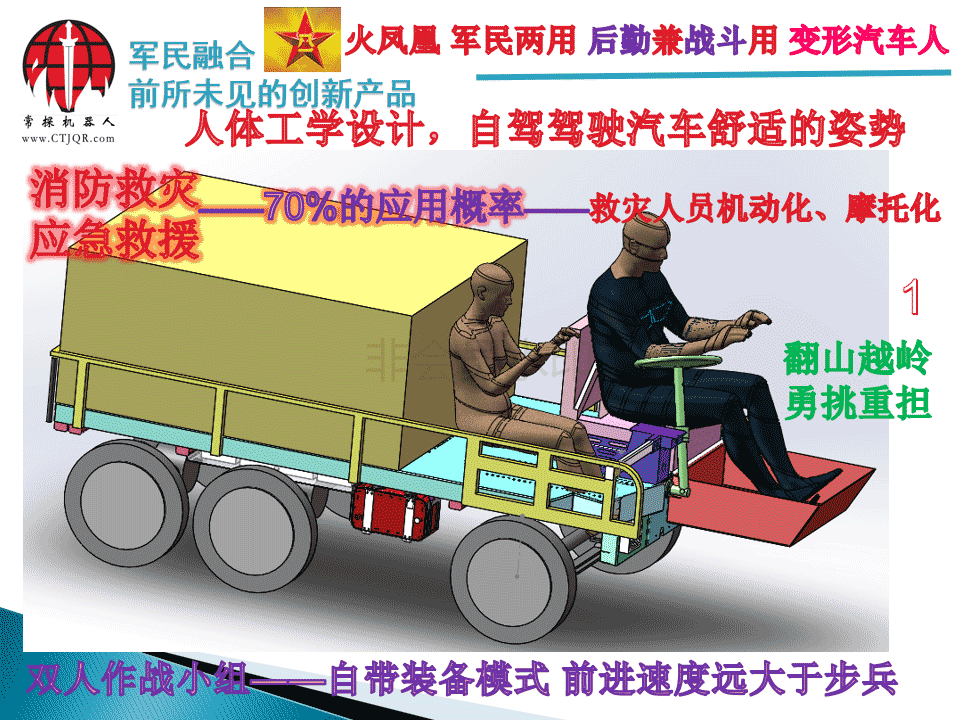
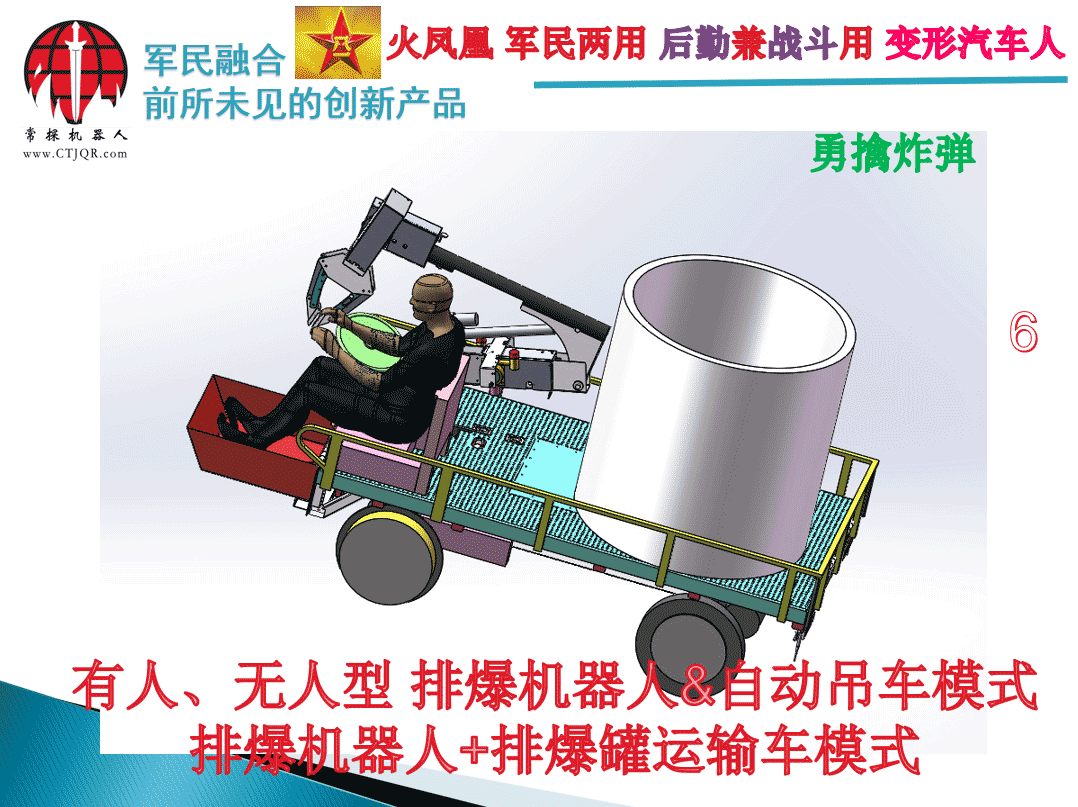
可有人驾驶,减少遥控驾驶员伴走时的体力消耗,实现人车合一!

模块化机器人——未来的机器人将不再根据特定任务来设计和构建,新机器人系统最终有望推动生产可以适应不同任务要求的机器人。
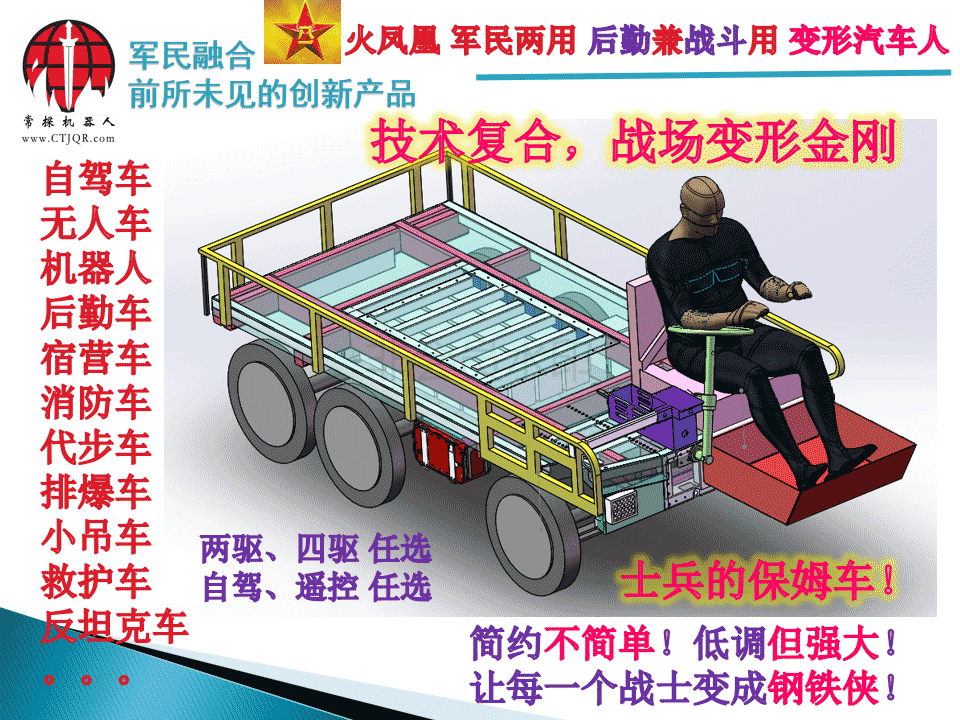
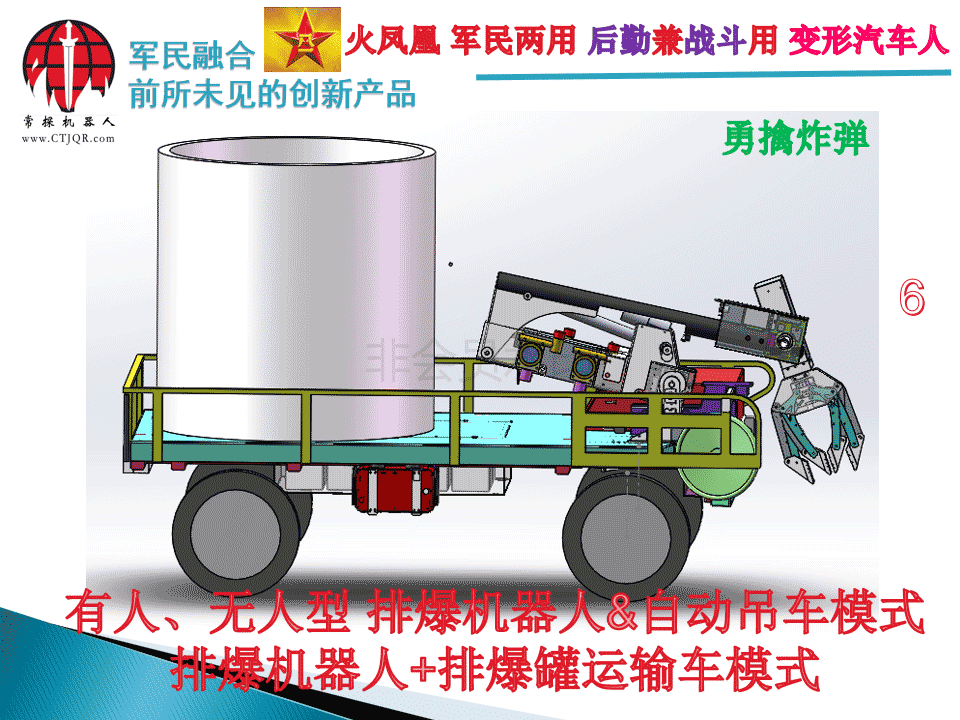
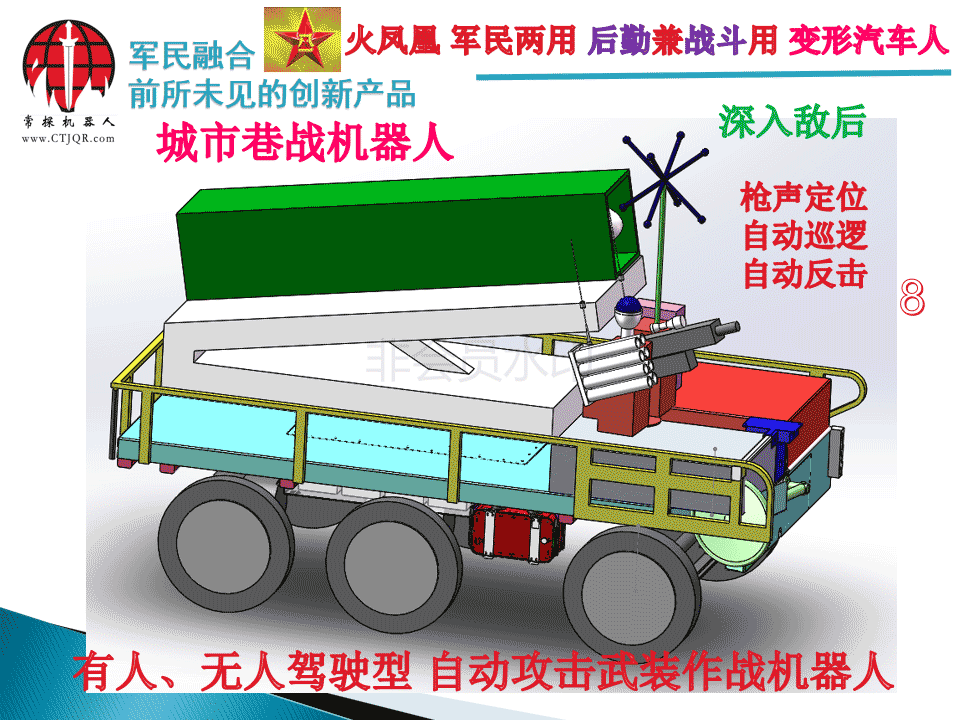
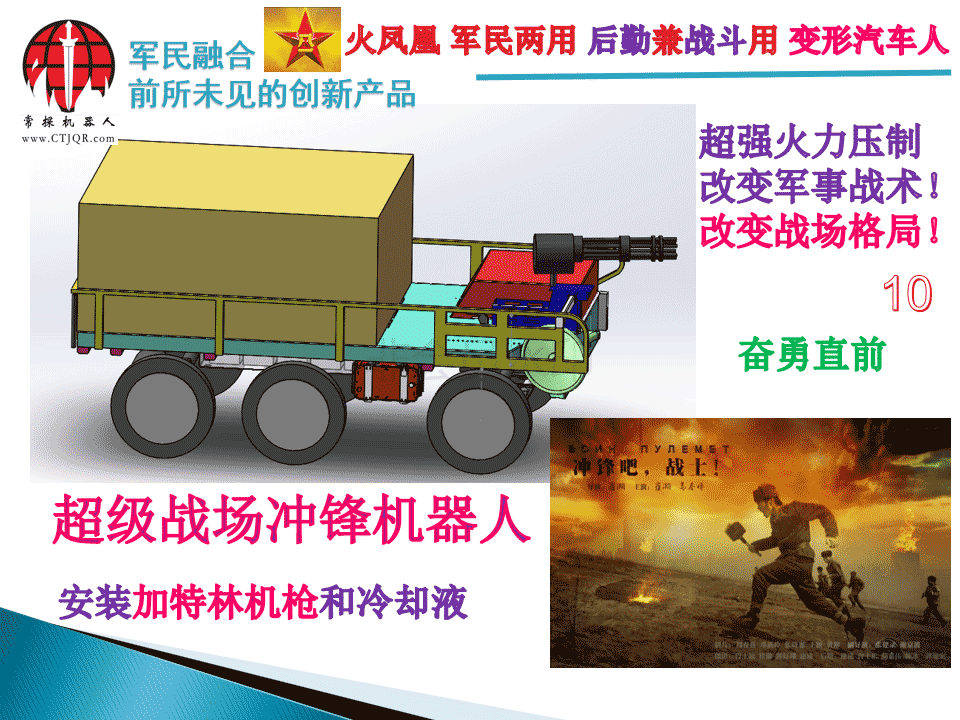
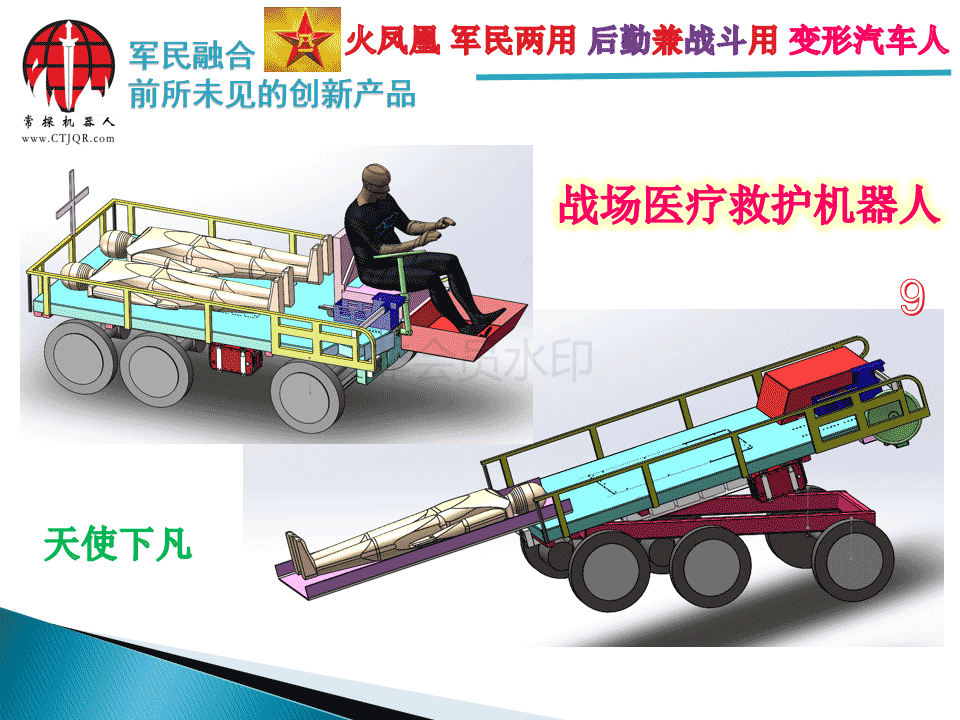
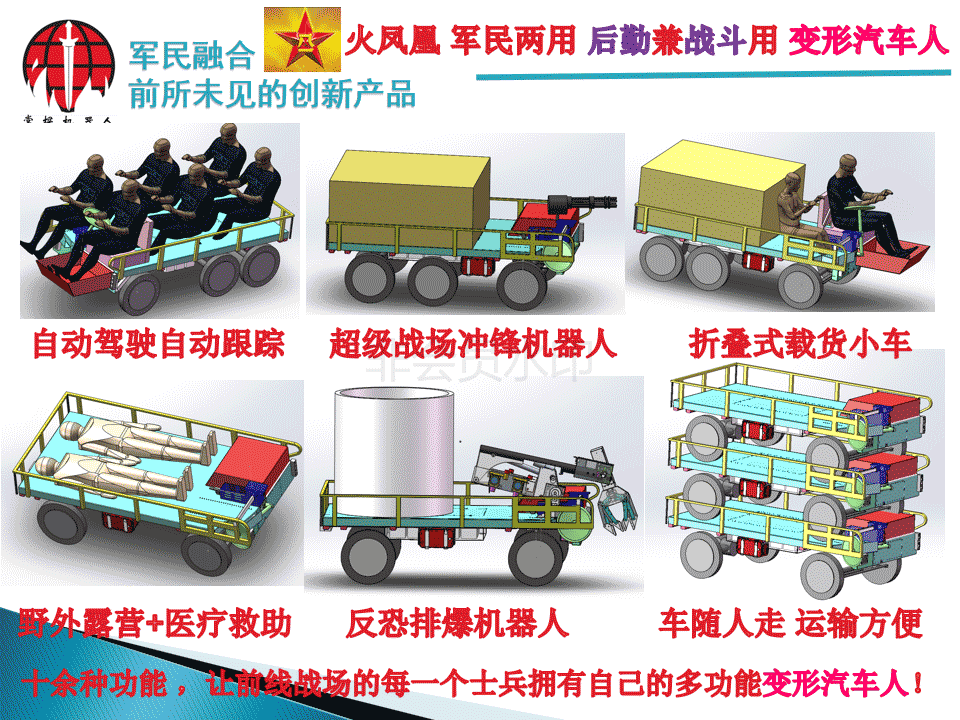
模块化变形汽车机器人属于汽车、无人车和机器人技术领域,是一种设计为带有折叠型驾驶室的可驾驶的多功能汽车机器人平台,主要用于排爆、消防、应急救援、工厂自动安全检查和军事等场所,通过模块化的平台设计,实现一机多用。车体的甲板表面上设有若干固定孔;甲板上设有若干插座,插座与机器人控制器电气连接,从而实现机器人上装模块化、功能模块化;同时设计有模块化中控塔,可以根据需要安装,满足人机结合需求;且预留了方向盘储藏空间,可以通过安装电子方向盘实现有人驾驶,为人机一体化奠定基础。本发明功能多样化,能与多种机器人工具相配合使用,能实现人机协同,能够满足现有机器人和人机一体化的时代的需求。
背景技术
如今社会需要各种各样的机器人,但是目前的机器人装备,大多设定在固定式的功能,存在功能设定单一、很难有效拓展等缺点。无法满足战场的后勤运输、消防灭火、灾害救援等一机多用的现实需求。多数均设计为单一用途。且机器人没有预留有人车的方向盘驾驶接口和方向盘的暂存空间,以及座位安装空间,给大量潜在的机器人与控制人员的同时移动需求,造成了困难。
徒步行军和平常远足不同,作战的士兵要背负大量装备,负重会增加体力消耗,从而严重影响行军的速度,美军标准是要求正常负重是体重量的30%,历次作战中我军步兵的平均负重都在20至25公斤,到了1951年和美军作战时,往往要携带的一周的作战物资和给养,这时平均负重达到了38公斤,这么重的负重对欧美步兵来说还可以应付,对亚洲步兵来说可是非常沉重的负担。
发明内容
为了克服上述现有技术的不足之处,本发明提供一种模块化带座位型变形汽车机器人。主要用于排爆、消防、应急救援、工厂自动安全检查和军事等场所,通过模块化的平台设计,实现一机多用。
本发明是通过如下技术方案实现的:
一种模块化带座位型变形轨道机器人,车体的甲板表面上设有若干固定孔;甲板上设有若干插座,插座与机器人控制器电气连接;甲板的前侧和/或后侧设有方向盘立柱安装座;方向盘立柱安装座用于安装电子式折叠方向盘结构的立柱下关节;所述的电子式折叠方向盘结构旁设座椅;座椅的靠背能折叠。
进一步地,所述的固定孔为阵列式或对称式排列;所述的插座的上表面不高于甲板的上表面。
进一步地,所述的甲板的前侧设有用于放置经过折叠后的电子式折叠方向盘结构的U型支架;所述的U型支架的旁边还设有用于放置经过折叠后的电子式折叠方向盘结构的的方向盘的缺口。
进一步地,所述的座椅上设有安全带;所述座椅对应有配备折叠驾驶室;折叠驾驶室通过折叠铰链与甲板铰接;所述的折叠驾驶室里面设有刹车板和油门板;所述的刹车板和油门板通过接插件连接到控制箱。
进一步地,所述的甲板还设有模块化中控塔;模块化中控塔通过下方的插头与甲板上的插座相连。
三、机器人本体性能参数:
1、动力:内燃机柴油动力 或 全电动机构
2、驱动形式:液压驱动 或 全电动机构
3、发动机额定功率(kw):≥70kw 或 全电动机构
4、行走速度:≥3.5Km/h
5、水带拖动能力:双水带DN80水带拖行400米
6、侧倾稳定角(°):≥20
7、越障高度(mm):≥170
8、紧急制动距离(m):≤0.4
9、最小离地距离(mm):≥170
10、最大爬坡度(°):≥25
11、手柄量化精确控制前、后、左、右各方向自由无极调速。
12、转弯半径(mm):原地回转、单侧旋转双模式随意切换。
13、机器人本体设计有可折叠的电子化方向盘和可折叠的驾驶舱,可以实现载人行驶,减少驾驶员体力消耗。——【选配的功能,会增加费用】
14、机器人采用积木化模块式设计,可以很方便的改成其他功能,(赠送的功能)
15、支持4路以上毒气探测器的快速安装使用。(赠送的功能,探测器另配)
16、最大支持18轴电机控制。并可扩展。
17、内置8路带钳流保护的电机驱动器,无需客户另配,即可直接控制拓展埠的8台直流电机,省时省力;自带短路保护功能,不怕短路!故障点脱开自动恢复正常,无需重启,放心使用!【赠送功能】。
18、机器人电量反馈功能:可远程了解机器人剩余电量。
19、机器人远程休眠功能:节约电能。
20、机器人故障远程排除功能:当底盘电机遇到障碍时堵转,造成电机驱动器死机时,可以远程控制,让机器人复活,放心使用。
21:内置2路输出功能,实现双路开火等功能。
22:带通讯信号反馈功能:信号是否连通,可以通过指示灯观察到。
23:视频频率切换功能:机器人的视频传输通道,可以由控制器数字化选择,从1~8选择最佳视频传输频率。
24:自动张紧履带张紧:为了减少客户的履带调整维护量,率先发明套装在底盘两侧 “倒角型底盘控制箱(以及电池保护箱)外壳”上面的 自动张紧器,通过弹性器件,实现履带的磨损自动弹性补偿,大大方便客户!(专利)
四、排烟风筒性能参数:
1、风筒排烟量(m³/h):≥70000
2、风筒送风距离(m):≥40
3、风筒水雾流量(L/s):≥6.0
4、风筒喷雾射程(m):≥ 35
5、风筒可调角度(°):水平360,俯仰45
6、工作压力(MPa):≥1.2
五、灭火装置性能参数:
1、电控遥控消防炮
2、消防炮射程(m):≥60
3、消防炮流量(L/s):≥80
4、泡沫炮射程(m):≥50
5、泡沫炮流量(L/s):≥60
6、工作压力(MPa):≥1.2
7、发电功率:75~300瓦,能够实现边灭火,边发电,满足石化环境长时间灭火的实际需求。【有国家检测报告】——【该发电功能选配,会增加费用】
8、无电灭火功能:机器人在没有电力的情况下,可以依靠机械运动,继续大范围灭火。(赠送功能)
六、其他关键部件性能参数:
1、水冷涡轮增压柴油发动机 或 全电动机构
2:整机牵引力(KN):≥30
七、云台监控及侦测性能参数:
1、俯仰角(°):-25 ~ +90
2、水平回转(°): 360
3、红外可视距离(m):≥40
4、CVBS视频信号输出,1080P/720P清晰度,具备光学远近缩放功能。
5、4G或无线图传至现场监控
6、4G互联网,将视频图像远程传输到指挥中心,方便决策者进行控制与数据分析.
7、无障碍遥控距离大于2000M,最大3公里,抗干扰能力强,可随时现场调整频道,避开与其它无线电设备的干扰。
八、机器人管路系统
1、供水管路:该消防灭火机器人的所有管道及元件,都经过静水压强度试验。在试验压力为管路承受的最大工作压力的1.5倍的情况下,所有管道及元件均未发生破裂、渗漏及永久变形,主要部件均选用优质不锈钢材质制作,其结果符合GB7959规定。
2、液压管路:所有软管和接头都能承受25MPa的压力,连接管路采用软管和钢性管相结合的形式完成。

九:雾状云灭火技术【赠送】
特点:浓烟滚滚时,无需特定范围进行小范围灭火,且消防水不浪费,大量吸热,同时二次污水产生较少。
由于自摆后灭火范围很大,一台机器人顶三台灭火机器人的灭火范围(雾状云)
由于自发电技术,一台机器人实现6台灭火机器人的工作效率(自发电+雾状云)无需换班。
加上自带4路毒气探测功能(探测器另配),等于无条件赠送了四台准毒气探测机器人。
到时只要客户根据实际情况,自由选配毒气探测器即可!无需编程即可接入机器人,进行远传。
特别适合石油石化等长时间,高浓度烟雾,且产生的消防水污染很大的环境。

通用平台参数(也可定制):
长2600(不含驾驶室)
宽1350
高700(不含栏杆)














消防机器人专利群:
特种机器人领域核心技术 | |||
专利类型 | 专利名 | 专利号 | 获得时间 |
实用新型 | 一种防腐防爆耐高温侧装箱体的可变重量机器人平台 | 201620035061.6 | 2016.1.14 |
实用新型 | 一种具有侦查功能的能热隐蔽的激光战斗机器人 | 201620035271.5 | 2016.1.14 |
实用新型 | 一种具有良好热隐蔽性的武装侦查打击机器人 | 201620035992.6 | 2016.1.14 |
实用新型 | 一种防腐防爆的多功能热成像探测救援机器人 | 201620035043.8 | 2016.1.14 |
实用新型 | 一种卫生防疫监测及救援机器人 | 201620035045.7 | 2016.1.14 |
实用新型 | 一种核电站救援与操作机器人 | 201620036761.7 | 2016.1.14 |
实用新型 | 一种自主导航的有害气体侦检机器人 | 201620037135.X | 2016.1.14 |
实用新型 | 一种耐高温永动型水力发电排烟机器人 | 201620034968.0 | 2016.1.14 |
实用新型 | 一种水力型自发电带照明的排烟风机 | 201620037134.5 | 2016.1.14 |
实用新型 | 一种超空泡技术的流量可调的消防炮头 | 201620035064.X | 2016.1.14 |
实用新型 | 一种可控自摆角度的永动型水炮机器人 | 201620036634.7 | 2016.1.14 |
实用新型 | 一种简易自走型自发电永动水炮机器人 | 201620035272.X | 2016.1.14 |
实用新型 | 一种可变重量可控灭火范围自发电的消防灭火机器人 | 201620034969.5 | 2016.1.14 |
实用新型 | 一种节能且低水阻型消防机器人用管道连接结构 | 201620037112.9 | 2016.1.14 |
实用新型 | 一种免维护履带结构 | 201620035028.3 | 2016.1.14 |
发明 | 一种防腐防爆耐高温侧装箱体的可变重量机器人平台 | 201610024756.9 | 2016.1.14 |
发明 | 一种具有侦查功能的能热隐蔽的激光战斗机器人 | 201610025625.2 | 2016.1.14 |
发明 | 一种具有良好热隐蔽性的武装侦查打击机器人 | 201610025642.6 | 2016.1.14 |
发明 | 一种防腐防爆的多功能热成像探测救援机器人 | 201610025291.9 | 2016.1.14 |
发明 | 一种卫生防疫监测及救援机器人 | 201610024113.4 | 2016.1.14 |
发明 | 一种核电站救援与操作机器人 | 201610024048.5 | 2016.1.14 |
发明 | 一种自主导航的有害气体侦检机器人 | 201610025629.0 | 2016.1.14 |
发明 | 一种耐高温永动型水力发电排烟机器人 | 201610024742.7 | 2016.1.14 |
发明 | 一种水力型自发电带照明的排烟风机 | 201610025618.2 | 2016.1.14 |
发明 | 一种超空泡技术的流量可调的消防炮头 | 201610025661.9 | 2016.1.14 |
发明 | 一种可控自摆角度的永动型水炮机器人 | 201610025641.1 | 2016.1.14 |
发明 | 一种简易自走型自发电永动水炮机器人 | 201610024065.9 | 2016.1.14 |
发明 | 一种可变重量可控灭火范围自发电的消防灭火机器人 | 201610025274.5 | 2016.1.14 |
发明 | 一种节能且低水阻型消防机器人用管道连接结构 | 201610025030.7 | 2016.1.14 |
发明 | 一种免维护履带结构 | 201610023794.2 | 2016.1.14 |
实用新型 | 一种电子式折叠方向盘(实新+) | 2018207645186 | 2018-6 |
发明 | 一种电子式折叠方向盘(发明+) | 2018104964324 | 2018-6 |
实用新型 | 一种磁吸式自动互锁接口(实新+) | 2018208284768 | 2018-6 |
发明 | 一种磁吸式自动互锁接口(发明+) | 2018105443606 | 2018-6 |
实用新型 | 具有气液探功能的模块化带座位型变形汽车型排爆机器人(实新+) | 2018210343548 | 2018-6 |
发明 | 具有气液探功能的模块化带座位型变形汽车型排爆机器人(发明+) | 2018107093819 | 2018-6 |
实用新型 | 一种具有气液探功能的模块化无人车型排爆机器人(实新+) | 2018210328088 | 2018-6 |
发明 | 一种具有气液探功能的模块化无人车型排爆机器人(发明+) | 2018107071241 | 2018-6 |
实用新型 | 一种模块化带座位型变形汽车机器人(实新+) | 2018210322005 | 2018-6 |
发明 | 一种模块化带座位型变形汽车机器人(发明+) | 2018107093895 | 2018-6 |
实用新型 | 一种模块化可变形特种机器人及无人车平台(实新+) | 2018210343800 | 2018-6 |
发明 | 一种模块化可变形特种机器人及无人车平台(发明+) | 2018107076724 | 2018-6 |
2018-6 | |||
发明 | 一种模块化可折叠驾驶室 | 2018107071110.X | 2018-6 |
实用新型 | 一种模块化可折叠驾驶室 | 201821034321.3 | 2018-6 |
发明 | 一种模块化可拆卸中控塔 | 201810709501.5 | 2018-6 |